English
English


MPC运动规划控制器
MOTION PLANNING CONTROLLER

如本运动规划控制器深度适配主流工业机器人控制器,在对机器人实现精准、灵活控制的同时
配备有统一易用的机器人SDK和运动规划技术,让机器人的使用更加快速简单
配备有统一易用的机器人SDK和运动规划技术,让机器人的使用更加快速简单

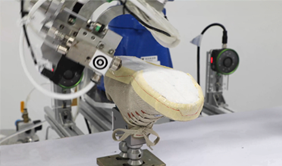
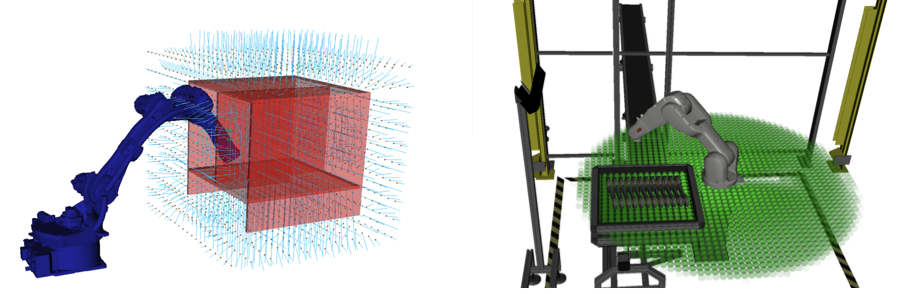
动态轨迹调整
基于实时在线轨迹生成技术和对机器人自身控制器的深度定制
如本运动规划控制器允许用户实时调整机器人运动轨迹,从而让视觉伺服、力控、激光跟踪焊接等高级功能的实现成为可能
如本运动规划控制器允许用户实时调整机器人运动轨迹,从而让视觉伺服、力控、激光跟踪焊接等高级功能的实现成为可能

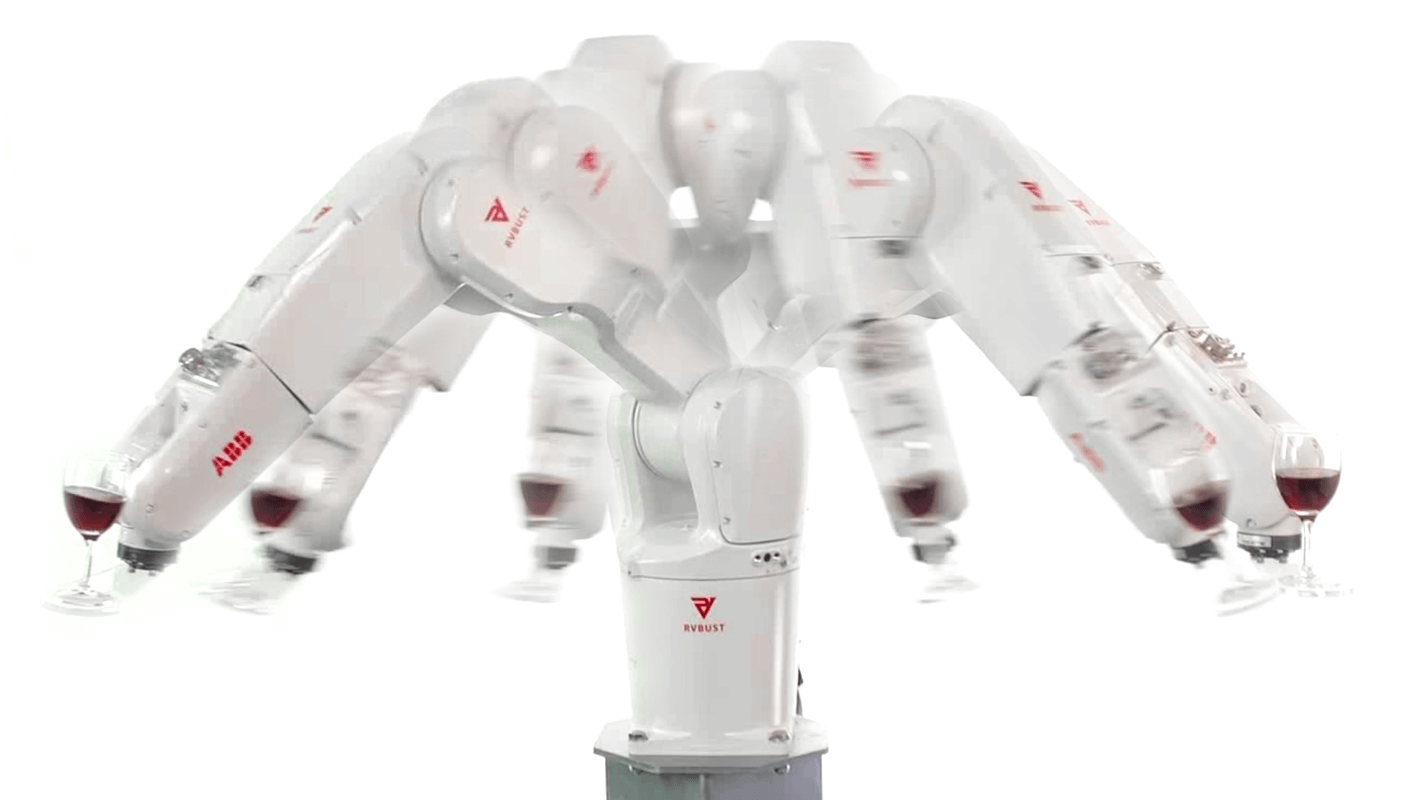
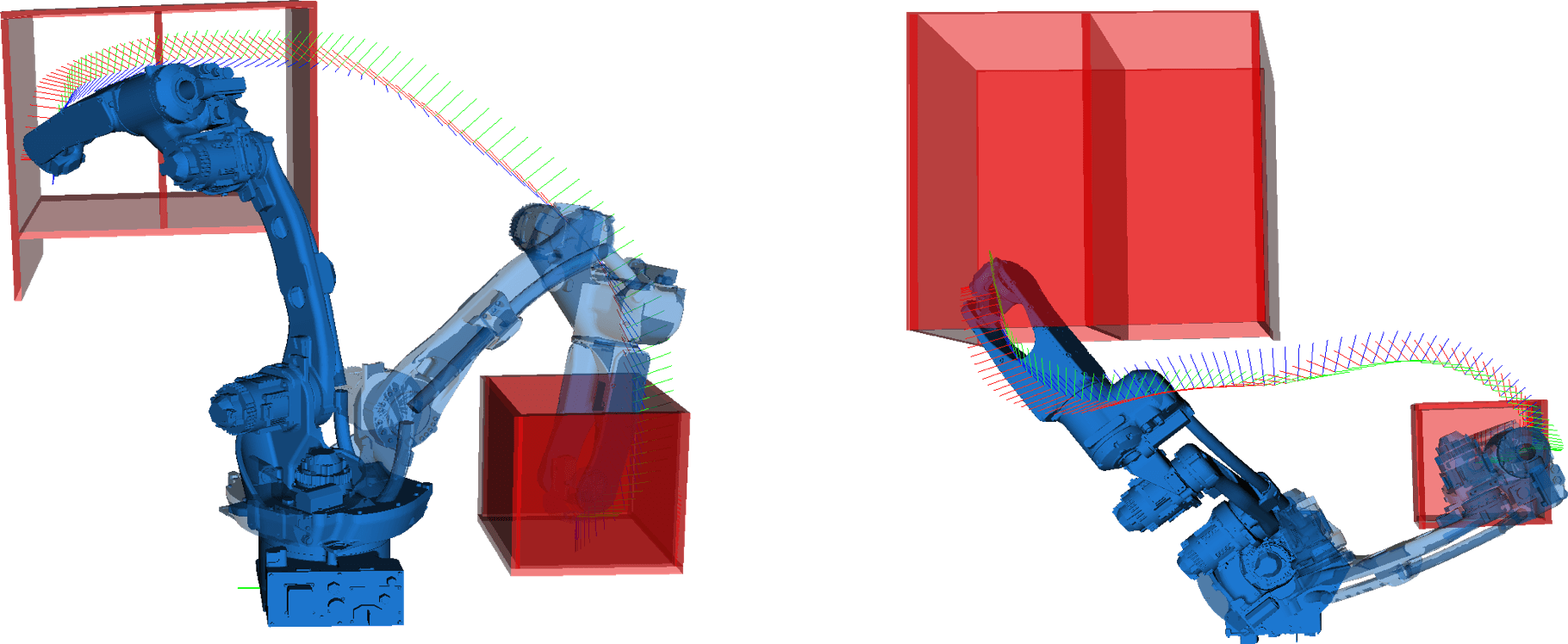
精准轨迹控制
基于对主流工业机器人控制器的深度定制,如本运动规划控制器可以对机器人的整个轨迹进行精准控制
而非仅控制轨迹上的几个路径点,大大提高了算法的适用性
而非仅控制轨迹上的几个路径点,大大提高了算法的适用性
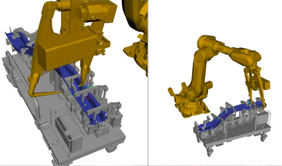
自动路径生成
如本运动规划控制器能够根据用户指定的任务,自动计算出运动轨迹
避免进行繁琐的示教工作,无需考虑关节极限、奇异点、碰撞等问题
配合精准的轨迹控制,如本控制器可以精确计算并控制机器人执行动作的节拍
避免进行繁琐的示教工作,无需考虑关节极限、奇异点、碰撞等问题
配合精准的轨迹控制,如本控制器可以精确计算并控制机器人执行动作的节拍
三维仿真环境
标配三维可视化仿真环境,提供与实际机器人完全一致的仿真机器人控制器接口
可以在仿真环境中完成调试,之后直接在实际机器人上实现部署,大大降低机器人调试与部署的难度
可以在仿真环境中完成调试,之后直接在实际机器人上实现部署,大大降低机器人调试与部署的难度
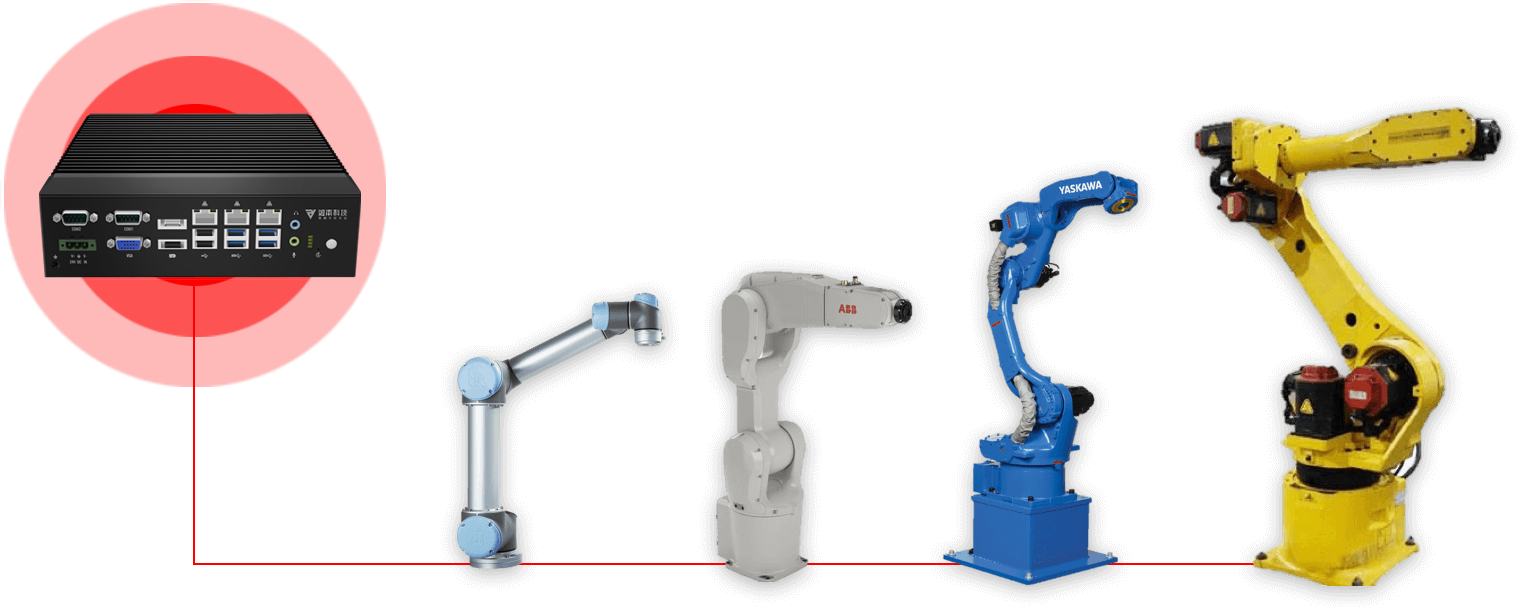
统一开发接口
统一易用的接口,深度适配ABB、Yaskawa、Fanuc、UR等多家主流机器人
同时支持 C++/Python 两种编程语言,为算法开发人员屏蔽机器人底层差异
不用关心具体使用的机器人型号,专注算法开发与部署
同时支持 C++/Python 两种编程语言,为算法开发人员屏蔽机器人底层差异
不用关心具体使用的机器人型号,专注算法开发与部署