 中文
中文

Motion Planning Controller
Accuracy Adaptive Easy Unified

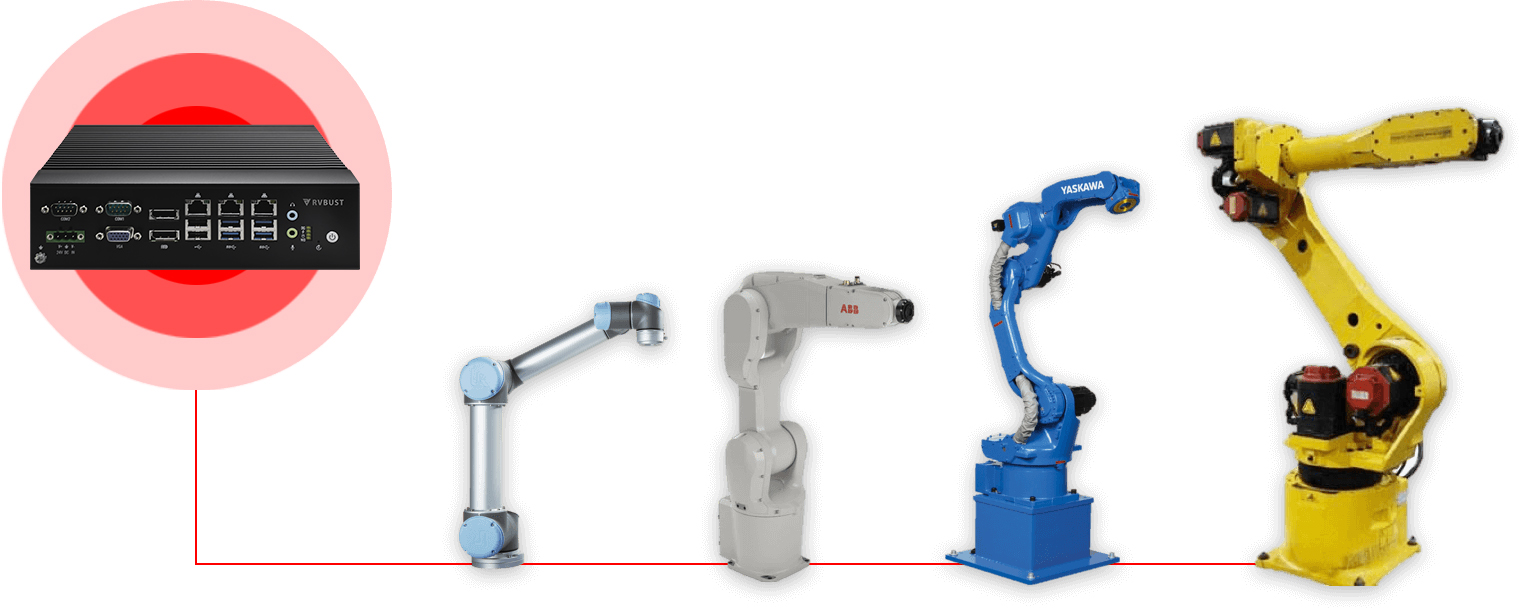
RVBUST motion planning controller provides unified operation for most well-known robots, such as Universal Robot, ABB, Yaskawa and Fanuc.
By supplying easy-to-use SDK and motion planning technology, users can generate highly accurate and adaptive robot motion for any robot.

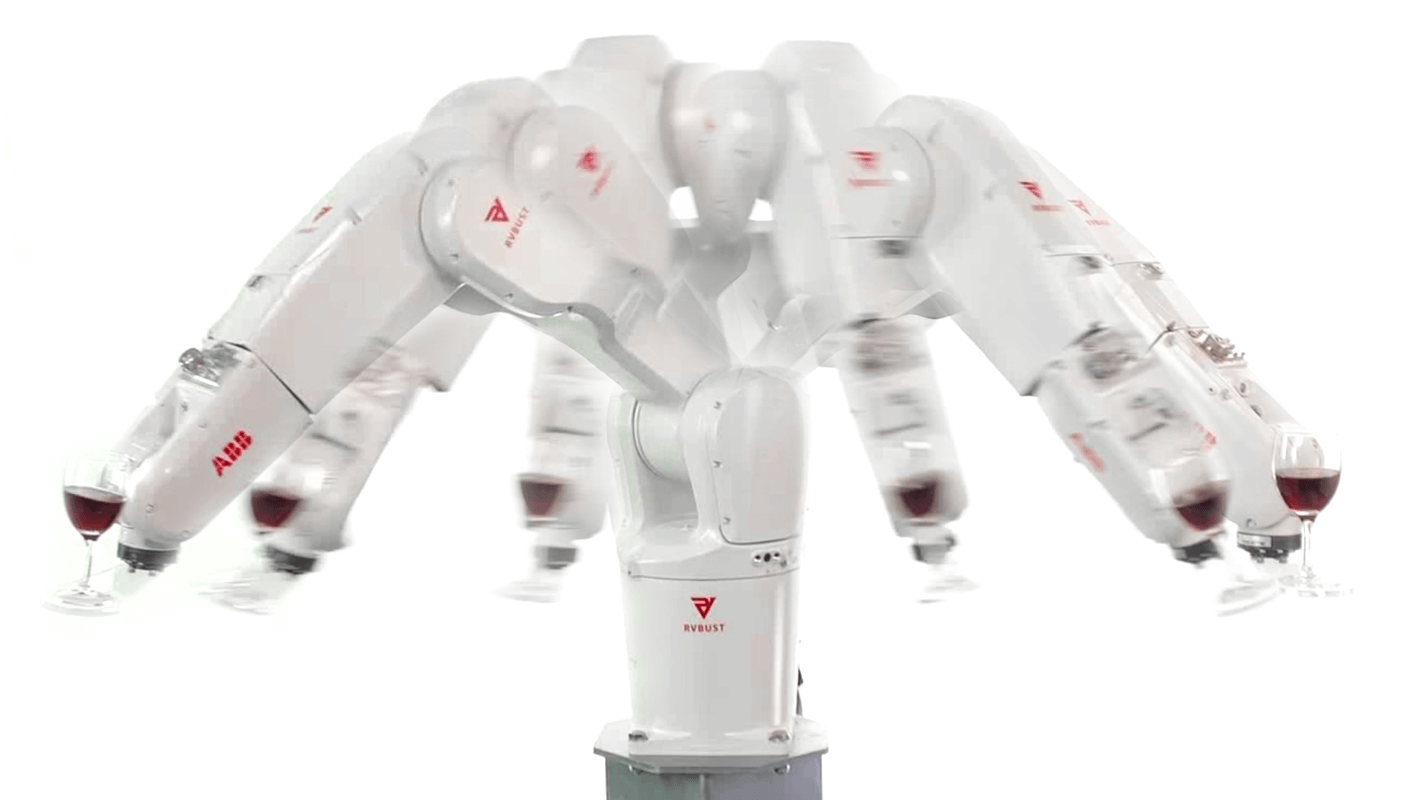
Online Trajectory Generation
Based on real-time trajectory generation technology and deep customization of different robot controllers,
RVBUST motion planning controller allows users to modify the robot's motion on the fly,
which makes it possible to realize advanced tasks, such as visual servoing, force control and laser tracking welding, etc.
RVBUST motion planning controller allows users to modify the robot's motion on the fly,
which makes it possible to realize advanced tasks, such as visual servoing, force control and laser tracking welding, etc.

Accuracy Trajectory Control
Rather than simply sending a few waypoints to the robot controller, RVBUST motion planning controller can accurately control the entire trajectory.
With this feature, we can accurately control the robot's cycle time, and make it possible to generate robot moiton under dynamic contraints.
With this feature, we can accurately control the robot's cycle time, and make it possible to generate robot moiton under dynamic contraints.
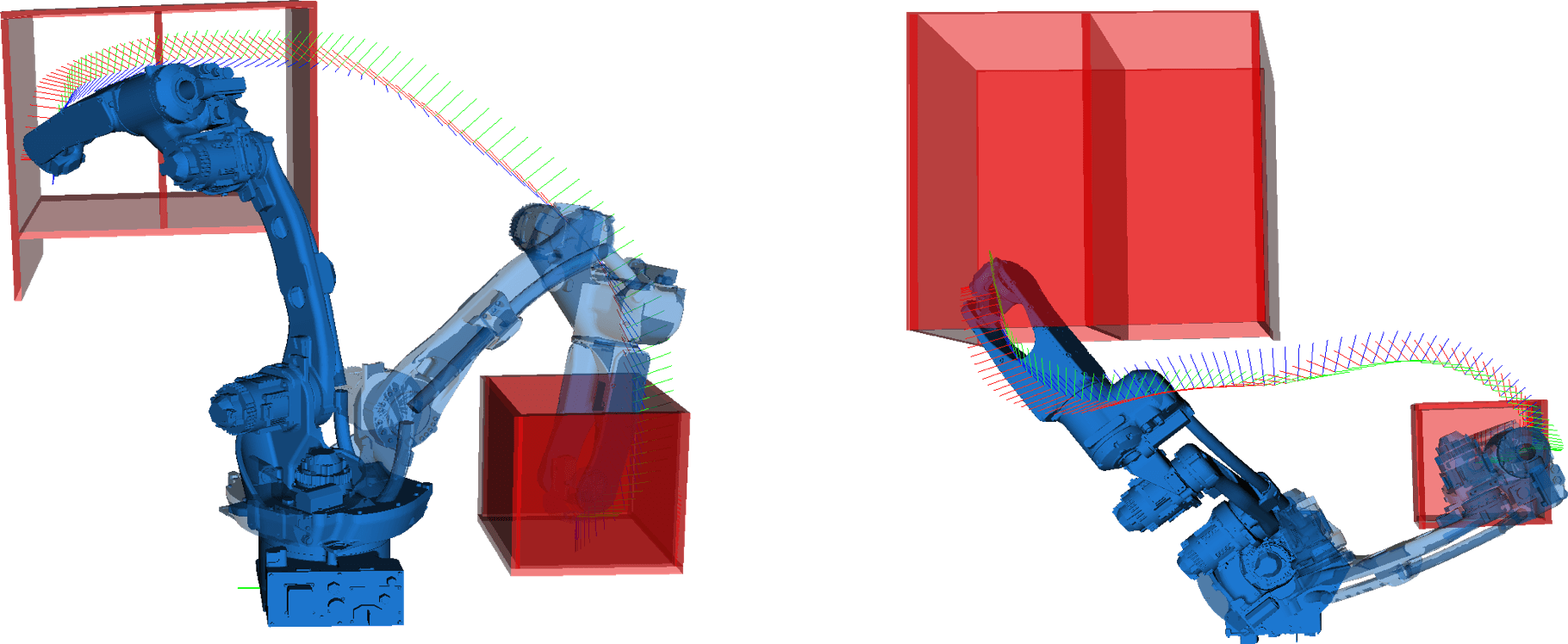
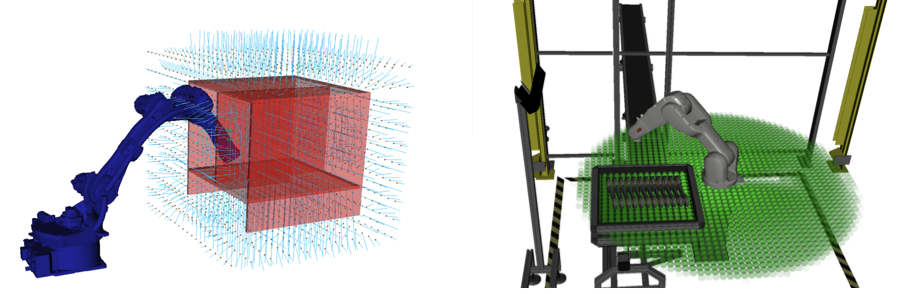
Automatic Path Planning
RVBUST motion planning controller can automatically generate robot motion, there is no need to consider joint limits, singular points and collisions, etc.
With the accurate trajectory control feature, the cycle time of real world robot can be accurately computed and controlled.
With the accurate trajectory control feature, the cycle time of real world robot can be accurately computed and controlled.
3D simulator
3D simulator provides simulated robot controller, which has the consistent operation interface with real robots.
Tasks can be programmed in simulation environment and be deployed directly on the real robot, making robot deployment much easier.
Tasks can be programmed in simulation environment and be deployed directly on the real robot, making robot deployment much easier.
Unified Operation Methods
Unified and easy-to-use interface for most well-known robots, such as ABB, Yaskawa, Fanuc and Universal Robots, etc.
Both C++ and Python programming languages are supported. Users can develop applications for new robot without training.
Both C++ and Python programming languages are supported. Users can develop applications for new robot without training.

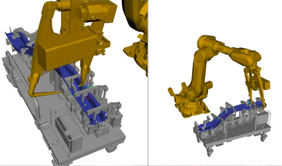
Videos
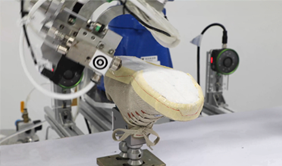
Cold press molding flexible shoe coating system

Engine cylinder head grabbing
Robot spot welding trajectory automatic generation

Vision-guided laser cutting





Copyright © 2022 RVBUST All rights reserved.粤ICP备2021109251号